超大空间方案
针对旅游景区、城市街区、大型商业综合体等面积超过 数十万平方米 甚至 百万平方米 级别的超大场景,传统的“单次采集、单一大地图”模式无法满足需求。本文档将介绍如何处理超大空间场景的采集、使用问题,以解决单一超大地图引发累积误差过大、内存溢出等问题。
核心挑战
在处理数百万平方超大空间时,试图建立一个单一的巨型地图会面临许多技术障碍:
- 采集难题:单次采集时间过长会导致设备过热、数据量过大(数百 GB),上传和处理极其困难。
- 累积误差:建图误差会随采集距离累积,在数公里的路径上,即使是 1% 的误差也会导致几十米的偏移,且难以修正。
- 性能瓶颈:加载、优化百万平方米的地图数据会瞬间耗尽设备的内存。
解决方案:分块与融合
解决超大空间问题的标准方案是 化整为零,将整个大场景在逻辑上切分为多个物理上相互重叠的 子区域,分别采集每个子区域,最后将所有子区域进行融合优化。从而可以实现在运行时通过动态加载实现无缝漫游。
数据采集
您需要按照 超大空间数据采集方法 进行规划。
- 切分原则:将大场景按照面积、场景或者功能区域进行划分,每个区域的面积应该在
十万平方左右。 - 重叠要求:相邻的子区域之间
最少需要 200 米完全重叠的路径,重叠区域越大融合出来的地图越好。需要确保有足够的重叠区,以便融合优化相邻的子图。
在开始采集每个子区域数据之前:
- 进行采集路线规划
- 检查GoPro Max 设备配置或GoPro Max2 设备配置
- 阅读并熟悉采集方法
- 熟悉导出 GoPro Max/Max2 数据步骤
创建建图任务
- 若您是第一次使用 Mega 建图,首先需要新建建图项目
- 可以在 Mega 开发中心,创建大超大范围多图融合任务。上传多段分块采集的视频,云端建图算法会自动拼接、优化。
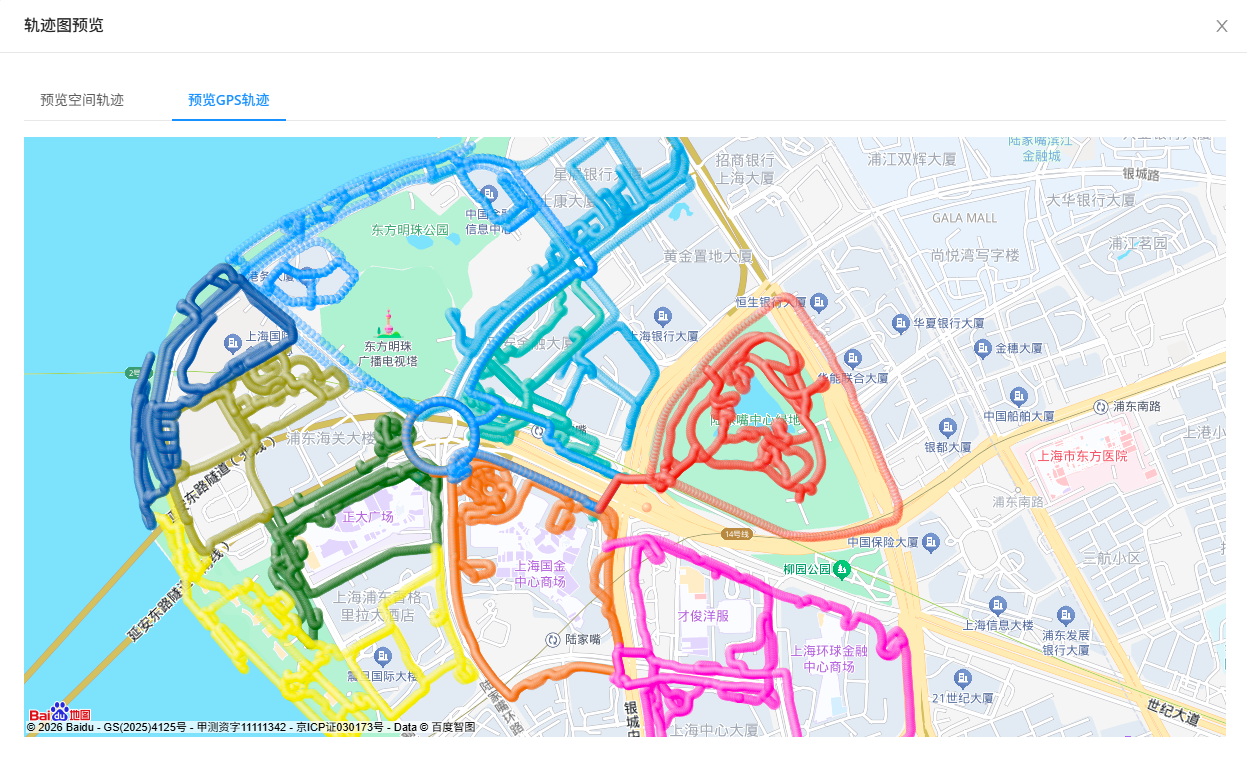
查看建图结果
建图完成之后,您可以查看建图结果:
测试定位效果
- 若您是第一次使用 Mega 定位,需要配置定位库
- 快速验证定位库是否可用
- 查看模拟运行效果
- 查看现场真实运行效果
运行策略
经过融合后的地图不需要做任何处理,当成单图直接使用即可。
- 基于 GNSS 的查询:室外场景中,会利用 GNSS 辅助查询地图,做到大地图也能精准定位。
- 按需加载:在摆放内容的时候,可以单独加载每个子区域的 Mesh。
- 无感切换:
- 定位算法会同时在子图 A 和子图 B 中运行。
- 在重叠区域,内容也会无感切换。